My Projects
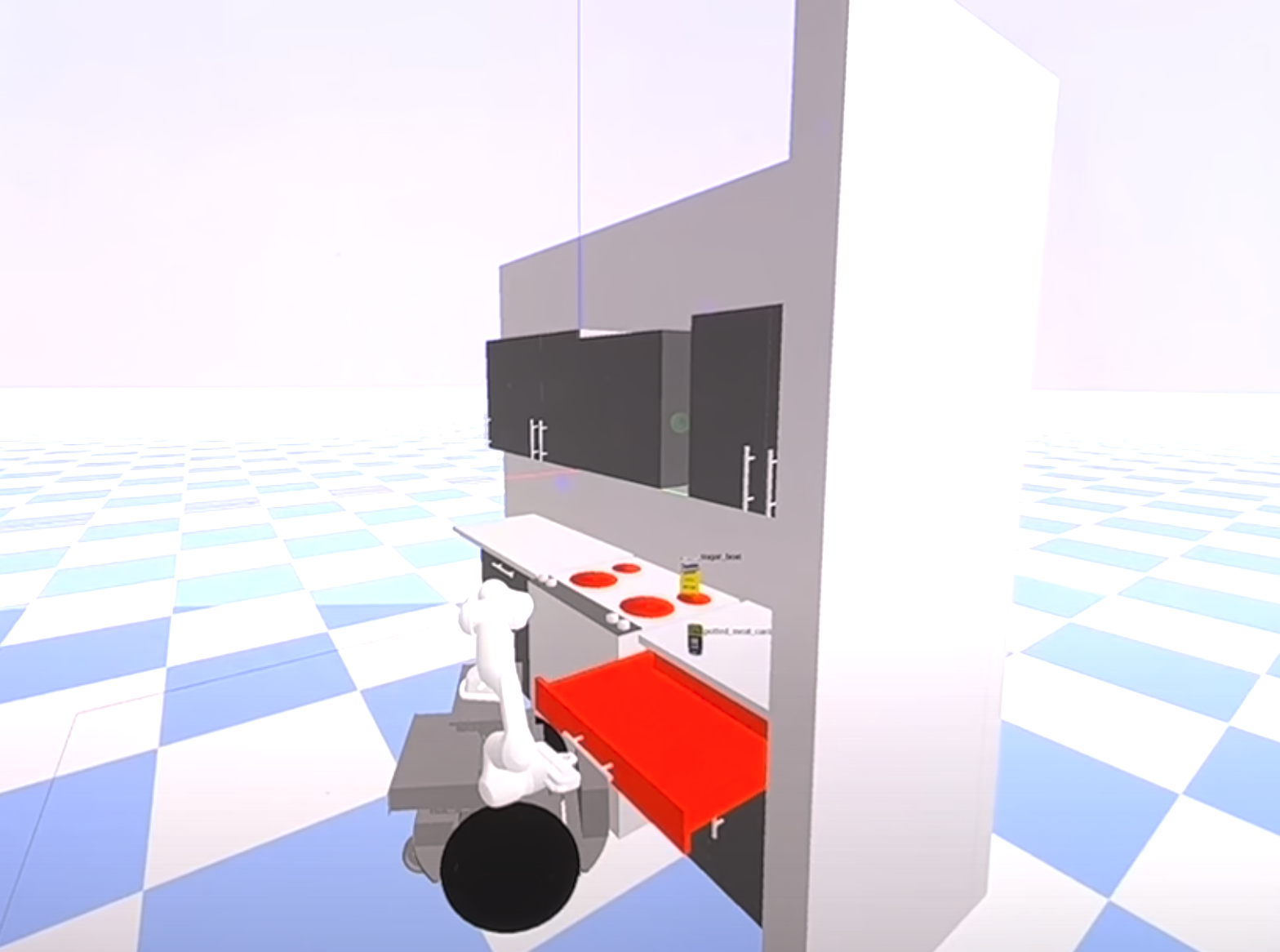
Simulated Kitchen Robot
This project demonstrates the integration of high-level autonomy with low-level path planning in a simulated kitchen environment. The robot utilizes two key technologies:
- PDDL (Planning Domain Definition Language) for high-level action planning and decision-making
- RRT (Rapidly-exploring Random Tree) algorithm for configuration-space exploration and object manipulation
To limit the scope of the project, path optimization and object avoidance were tested separately. The system effectively plans and executes complex manipulation tasks in a simulated kitchen environment.
View the demonstration videos here.