My Projects
Vehicle Propagation Model
This project addresses the challenge of tracking an unknown vessel in open waters using multiple sensors across different platforms. The method employs a discrete approach that offers several advantages over particle-based methods:
- Deterministic results: The same inputs consistently produce the same outputs
- Data transferability: Information can be easily shared between multiple search vehicles
The model operates under the following assumptions:
- The target vessel exists in the search area
- The target maintains a linear trajectory at the last known velocity and heading without course changes
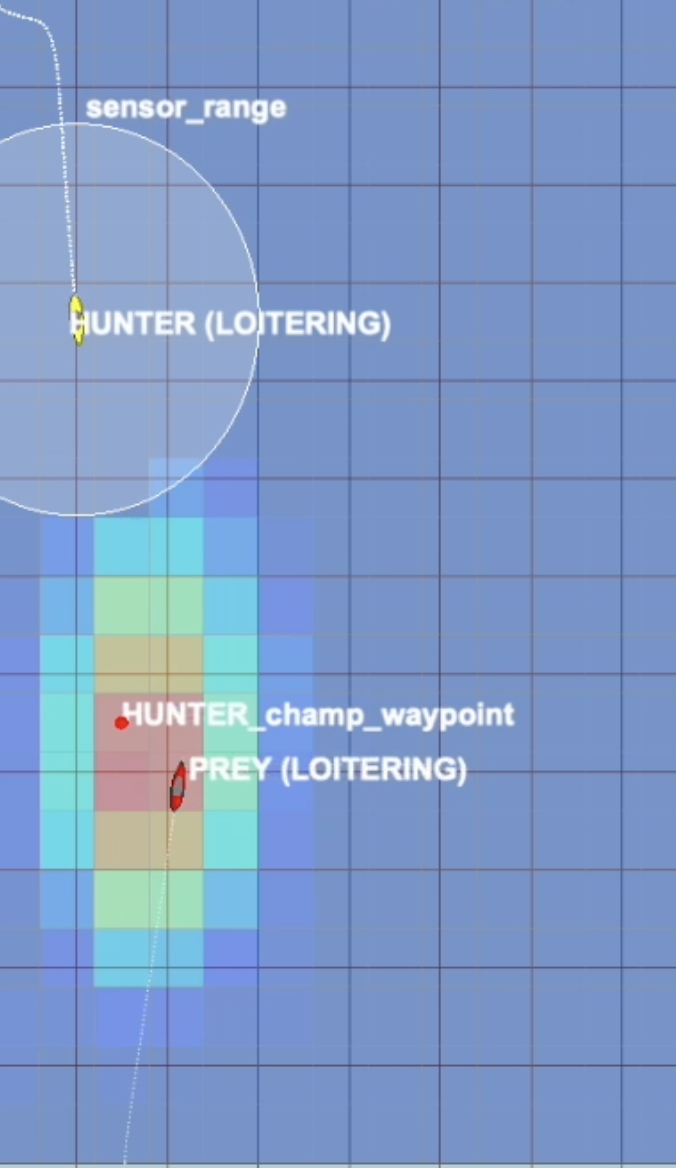
The methodology utilizes estimated heading/speed and their variances to generate a kernel for probability grid convolutions, inspired by linearized hidden Markov models. While the discretization approach introduced numerical artifacts that affected the results, the project provided valuable insights into probabilistic tracking methods.
View a demonstration video here.