My Projects
Nonlinear Adaptive Controller
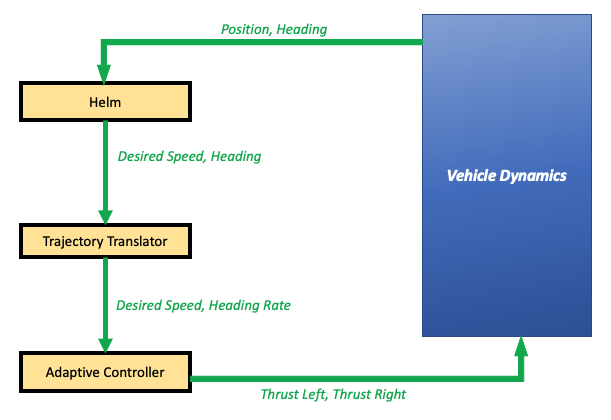
I developed a model-based nonlinear adaptive controller for an autonomous surface vehicle. The controller features two operational modes: a PD controller with sliding variable integration, and a sliding-mode controller configuration. The system demonstrates robust performance in real-world conditions.
You can view a demonstration video here and access the final report here (backup link here).